ROS Selection Task 2024-2025
Problem statement
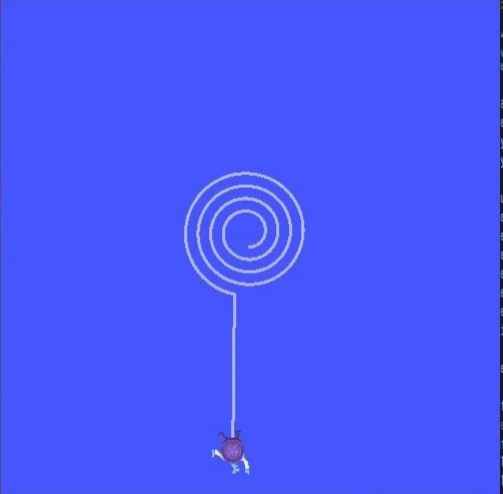
The objective of the task is to move the turtle inside the turtlesim window in a vertical Candy shape
To acheive this task you are supposed to create a node named /node_turtle_move within a python script, node_turtle_move.py
Dont worry if you are new to ROS or Linux(Ubuntu), the task is fairly simple and we have provided you with ample resource and tutorials in this WIKI to the complete this task so only a strong will and a little bit of brains is required to get the work done. Also even though this just a weekend task we have provided ample amount of time as we also have our midterm exams during this time. So we think a week time is enough so you guys can give your exams freely and manage your time in order to complete the task
Note
All the resources to complete the said task are provided in the ROS section of ATOM WIKI. So make sure to check it out if you are new to ROS2.
Warning
The Deadline for completing the task is 15th October, 2024.
Expected Output
Caution
The CANDY should be VERTICAL. Also the max number of spirals can be of your choice but 3 spirals are required.
Hints
The turtle needs to move in a vertical Candy shape .
You can refer POSE to learn more about pose function.
You can refer TWIST to learn more about twist function.
Use linear velocity and angular velocity to get this done.
Keep tracking the distance travelled so as to know when to stop. You can refer to Overview of rclpy for more hint
Sample Code Snippet
Question: Write a python code to move ROS’s turtlesim bot on a straight path while bot’s distance is less than 3.
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
from geometry_msgs.msg import Twist
from turtlesim.msg import Pose
import math
class MoveTurtle(Node):
def __init__(self):
super().__init__('move_turtle')
self.start_x = None
self.start_y = None
self.target_distance = 3.0 # Distance to move in pixels
self.lin_vel = 2.0 # Linear velocity
# Create a publisher for controlling the turtle's velocity
self.pub = self.create_publisher(Twist, '/turtle1/cmd_vel', 10)
# Create a subscriber for getting the turtle's position
self.sub = self.create_subscription(Pose, '/turtle1/pose', self.pose_callback, 10)
def pose_callback(self, pose):
if self.start_x is None and self.start_y is None:
# Set the starting position when the first pose message is received
self.start_x = pose.x
self.start_y = pose.y
self.get_logger().info(f"Starting position set to X = {self.start_x:.2f}, Y = {self.start_y:.2f}")
# Calculate the distance from the starting position
distance = math.sqrt((pose.x - self.start_x) ** 2 + (pose.y - self.start_y) ** 2)
self.get_logger().info(f"Distance from start = {distance:.2f}")
# Create a Twist message to set the turtle's velocity
vel = Twist()
vel.linear.x = self.lin_vel
vel.linear.y = 0.0
vel.linear.z = 0.0
vel.angular.x = 0.0
vel.angular.y = 0.0
vel.angular.z = 0.0
if distance >= self.target_distance:
self.get_logger().info("Turtle reached the target distance")
vel.linear.x = 0.0 # Stop the turtle
self.get_logger().warn("Stopping Turtle")
self.pub.publish(vel)
rclpy.shutdown()
else:
self.pub.publish(vel)
def main(args=None):
rclpy.init(args=args)
move_turtle_node = MoveTurtle()
rclpy.spin(move_turtle_node)
move_turtle_node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
Commands used:
ros2 run turtlesim turtlesim_node
ros2 run package_name script_name
Procedure
Follow the instructions given below to get started with the task.
First, you will need to create a package named selection_task within your ROS workspace. Once your package is created, source and build your workspace.
Within this package, you should have a ‘scripts’ folder inside which you’ll create a python script, named node_turtle_move.py.
Fill the script with proper programming ethics. Doing this will help us understand your code better and quicker than usual.
After completing the python script. Make it executable, if it isn’t already. To do that, enter the following code.
cd ~/turtle_ws
colcon_build
source install/setup.bash
You can either run them in separate terminals or simply create a selection_task.launch file inside the
~/turtle_ws/src/selection_task/launch/folder. Launch file can run multiple nodes unlike a python/cpp script. Run the launch file, enter, This should run three processes in parallel.turtlesim_node
node_turtle_move.py
See also
Please refer to the tutorials and resouces given in the wiki or visit the official ROSWIKI if you need help with anything regarding ROS2.
Head over to Submissions to submit your work