ROBOTIC ARM
A.J.G.A.R project, which features a 6 Degrees of Freedom (DoF) robotic arm that can move in six directions. A robotic manipulator is commonly used in industrial and manufacturing settings for tasks such as pick and place, assembly, and welding.
ABOUT A.J.G.A.R
A.J.G.A.R is designed to autonomously handle objects, utilizing computer vision technology for this purpose. It also supports remote operation via teleoperation.
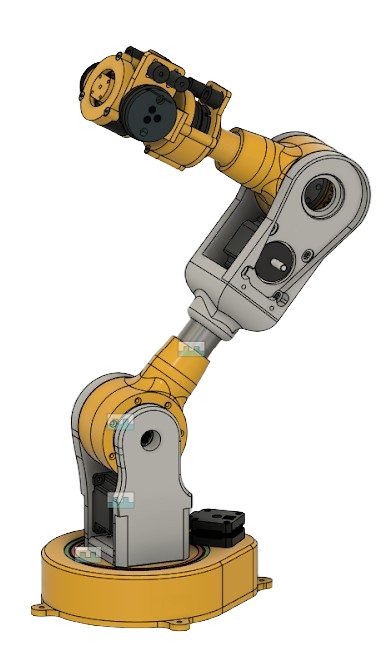
Fig1 : Cad model of Robotic Arm
The six degrees of freedom are typically achieved through the use of six stepper motors. Each stepper motor controls a single joint of the robotic arm, and together they allow the arm to move in a wide range of motions. The stepper motors are controlled by a microcontroller, which sends signals to the motors via stepper driver.

Fig2 : Robotic arm with multiple articulated joints, mounted on a base and connected to an electronic control board.
This project is divided mainly into three parts:
SOFTWARE : The programming of this project is done using moveit, ikpy, gazebo and rviz simulation and perception. With the help of a kinect camera we precisely predicted its environment in 3D space, which improved the interaction with objects and people.
HARDWARE : Firstly a cad model was designed for optimized use case then all the components and 3D printed parts were manufactured and assembled.
ELECTRONICS: The electronics comprised of circuit desgin, sensor interfacing and wiring placing.
